BLDC motor control - using TMC4671
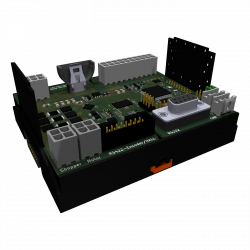
For a positioning system we have developed a motor controller using the TMC4671 chip from Trinamic.
We used the FOC from TMC4671 and programmed an own positioning software control running on an STM32 mikrocontroller. The motor controller supports further digital IO for opening/closing locks, motion detectors, light barriers, special function inputs and so on.
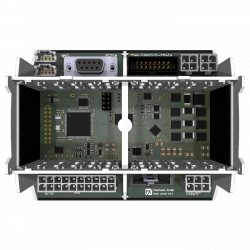
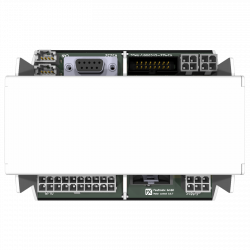
The motor controller can be controlled using CAN and RS232. We decided to support RS232 since there are Bluetooth-RS232 bridges available in the market.
For time based functions an battery buffered RTC is on board.
Our services
Conceptual design and development of the hardware and software.
Used technologies
- TMC4671motor controller from Trinamic
- STM32 mikrocontroller from STM32
- C/C++
- SPI
- UART
- CAN
- RTC
- Multilayer PCB
Used tools
- CubeIDE from ST
- ST-Link v2
- Eagle from Autodesk
- IXXAT USB-to-CAN V2
- Git